Artists
Year
2025
Materials
HTML and JavaScript, Processing and P5.js, Ollama (Qwen3 4B), ChatGPT, Python
Project Description
limp.freq deploys a population of self-navigating, cybernetics-inspired bots to examine how even relatively modest bodily asymmetries–exemplified by the artist’s own leg-length discrepancy (LLD)–shape behaviour not only at the scale of the individual (or the individual body), influencing posture, balance, and locomotion, but also generatively, as their effects cascade into collective perception, navigation, and environmental sense-making at architectural and spatial design scales.
Rather than celebrating bodily differences, most spaces still assume an imagined “standard” body–upright, symmetrical, mobile, two-handed, and two-legged (also sighted, hearing, and neurotypical). These presumptions may arise from explicit design choices, as in Le Corbusier’s Modulor man (the basis of the still-revered Unité d’Habitation), or more inadvertently, for example through the uncritical use of design tools that, in the name of effortlessness and usability, silently embed typical measurements. In either case, the frictions (or worse) encountered by non-normative bodies serve to expose how design is always a selective act, and how spaces encode assumptions about what is normal (and thus not just allowed but facilitated).
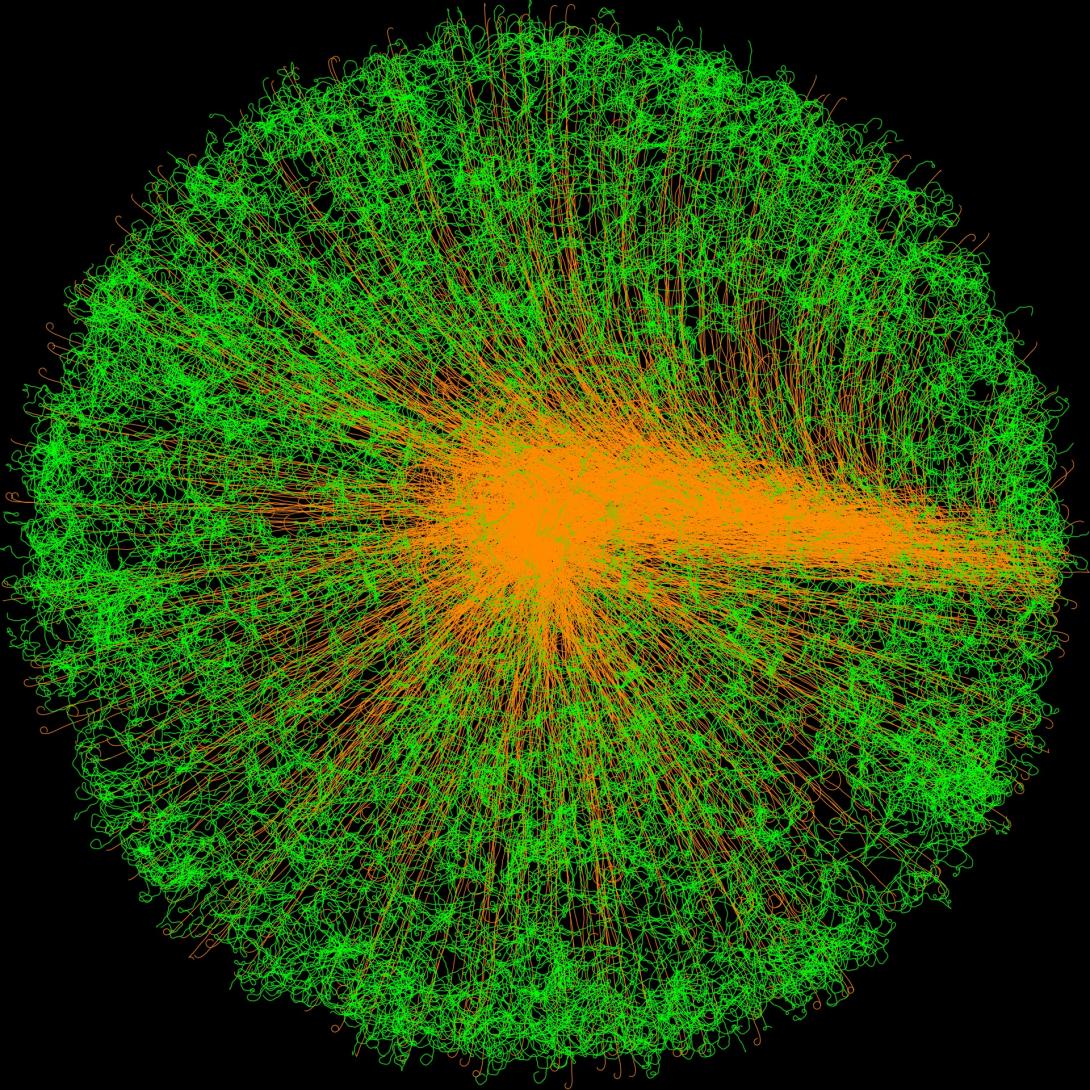
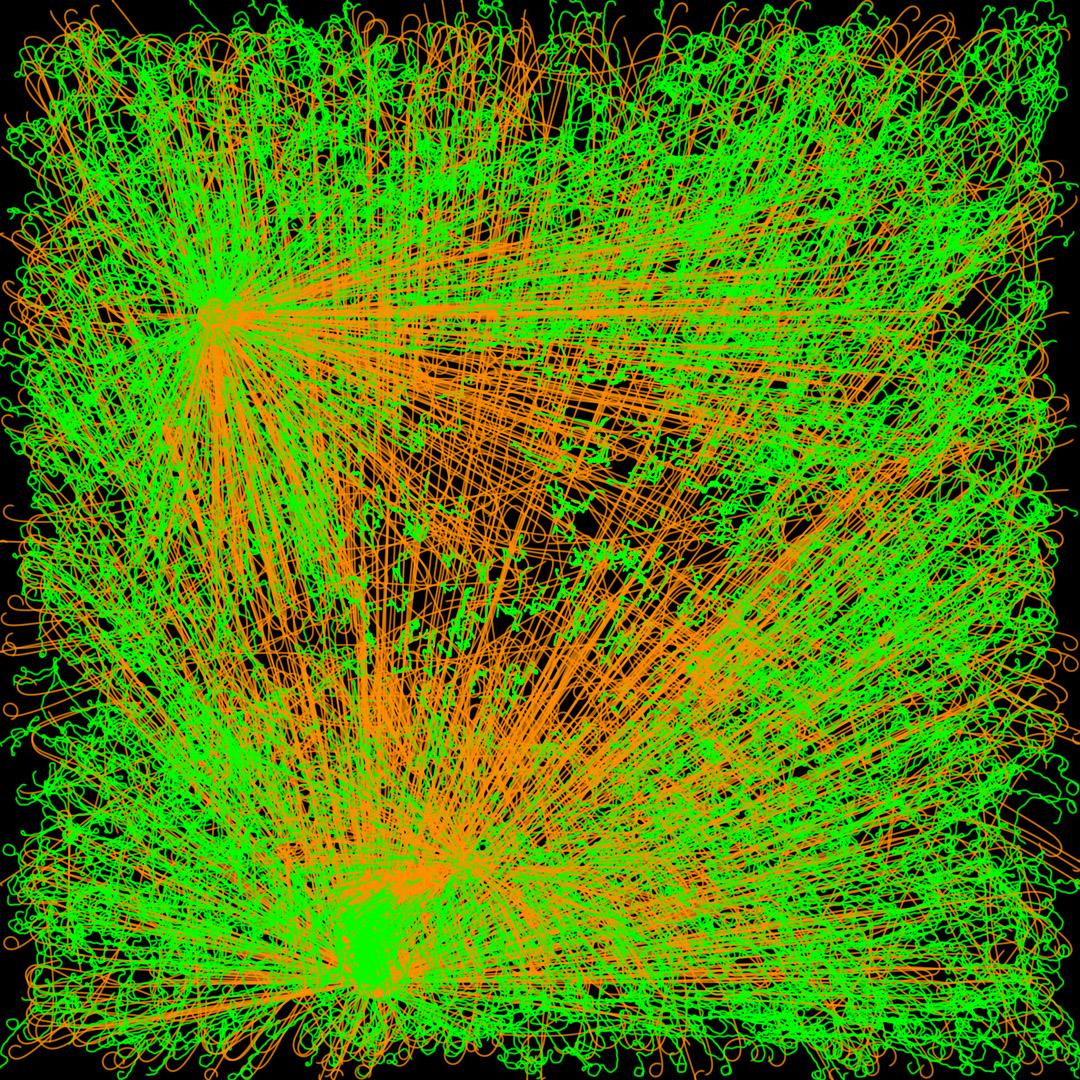
limp.freq is here presented as a series of five browser-based interactive simulations and nine still images created by these simulations, that, collectively, describe and document the divergent trajectories of two bot types, coloured green and orange. The orange bots are symmetric and approximate the efficiency-oriented behaviours privileged in standard algorithms, while the LLD-influenced, asymmetric green bots–less stable, more prone to fatigue, and in some cases actively avoiding less accessible terrain–produce slower, more messily meandering trails. However, these ostensibly “inefficient” paths reveal alternative cartographies of the 2-D and 3-D spaces used, foregrounding the epistemic richness of embodied variation and the limits of optimisation and universal design values.
In addition to contesting the normative spatial imaginaries through which bodies are measured, organised, and made legible–and in doing so calling for more pluralistic spatial thinking–the bots’ contrasting colours (green and orange) evoke two primal materials of early computing (phosphor and ferrite, respectively). Additionally, their underlying design is intentionally constrained so that the bots could plausibly have been (physically) built as contemporaries of Grey Walter’s tortoises (1949). Thus, a secondary and more subtly subversive function of limp.freq is to actively imagine–in the sense of speculative design–an alternative history of AI grounded in imperfection and diversity: a trajectory that challenges the persistent pursuit, fixed since the 1956 Dartmouth Conference, of order and perfection through abstraction (simplification) and exclusion.
Images
Interactive Simulations
The six images below link to interactive simulations in a new tab. A description is available beneath each link.
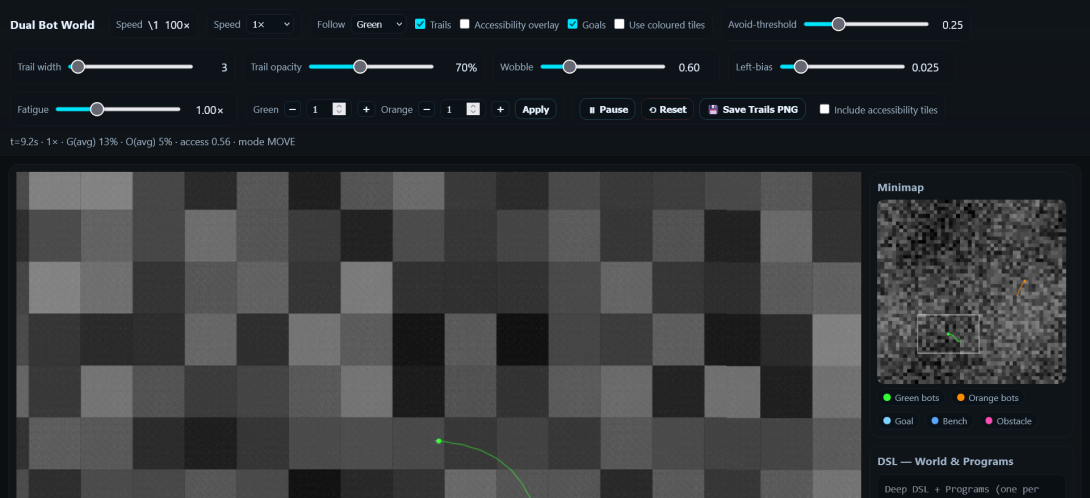
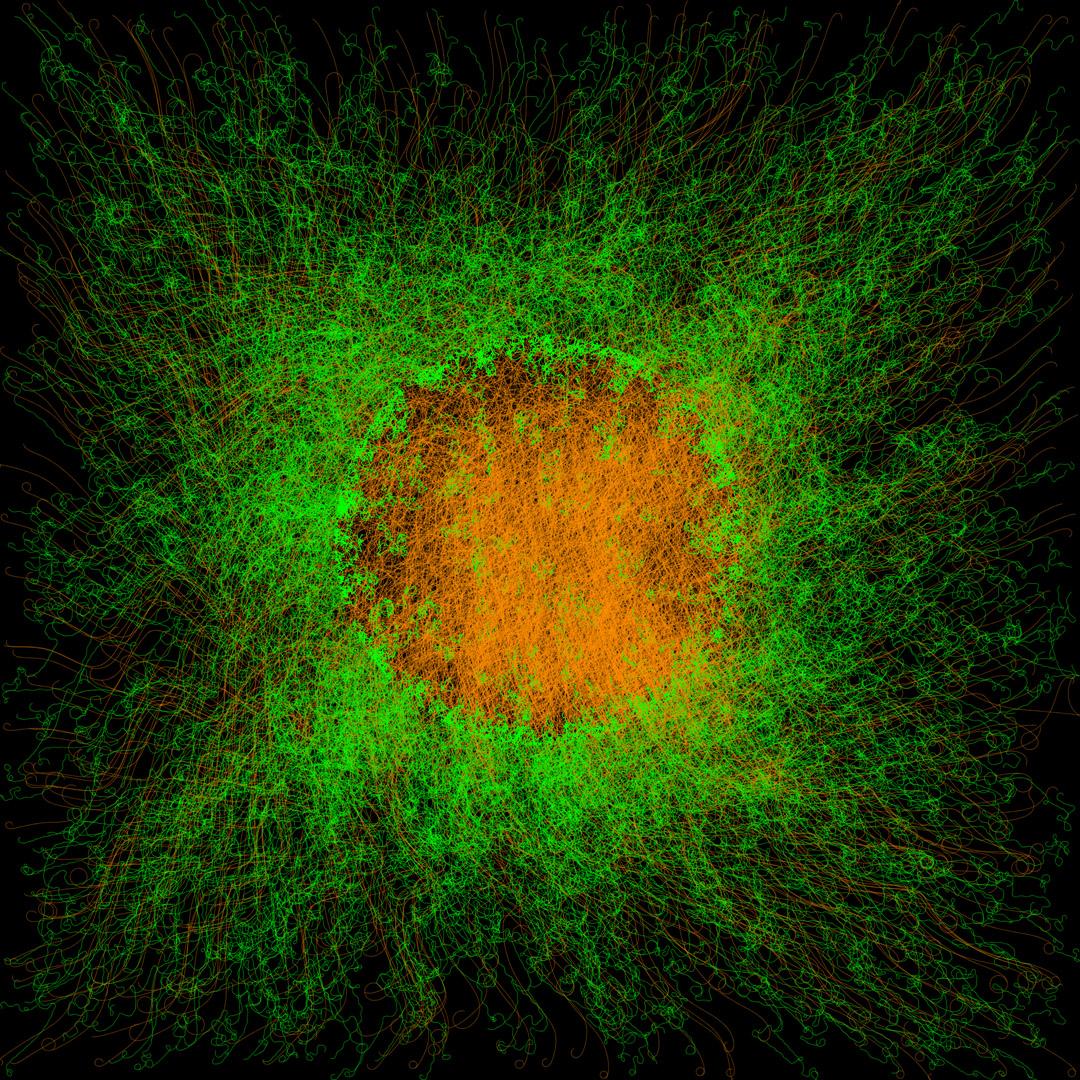
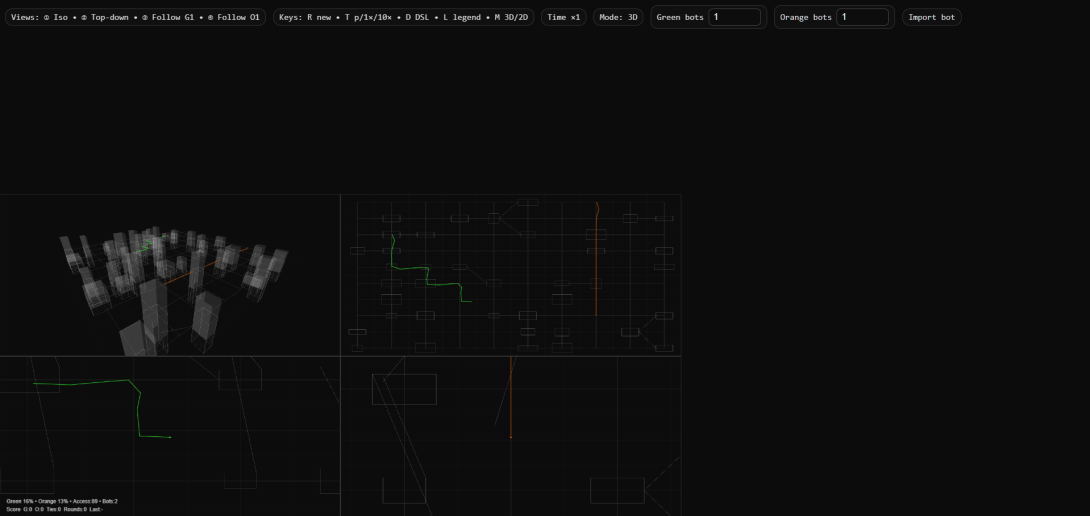
Simulation 1 (Introducing Asymmetry)
Two populations of autonomous, self-navigating bots - green and orange - navigate an algorithmic landscape of varying accessibility and resistance. They leave trails not only as records of movement but as inscriptions of effort: coloured traces shaped by divergent needs for energy, rest, and the avoidance of obstacles and the physically inaccessible. Built as part scientific model and part poetic system, the simulation reflects a world in which movement in space is never neutral. Each bot’s gait, bias, and exhaustion instead reveal a microcosm of embodiment - of how spaces and their systems accommodate or constrain difference. The asymmetric green bots are bent by design: their limping, slower cycles are not defects but alternate spatialties and temporalities that make visible what efficiency hides. Simultaneously, the more linear, efficient orange bots trace the normative expectation of continuous productivity and the standard(ised) algorithm. What emerges is not competition but a kind of cohabitation - a choreography of uneven agents whose differences serve to highlight the need for more pluralistic and inclusive spatial thinking.
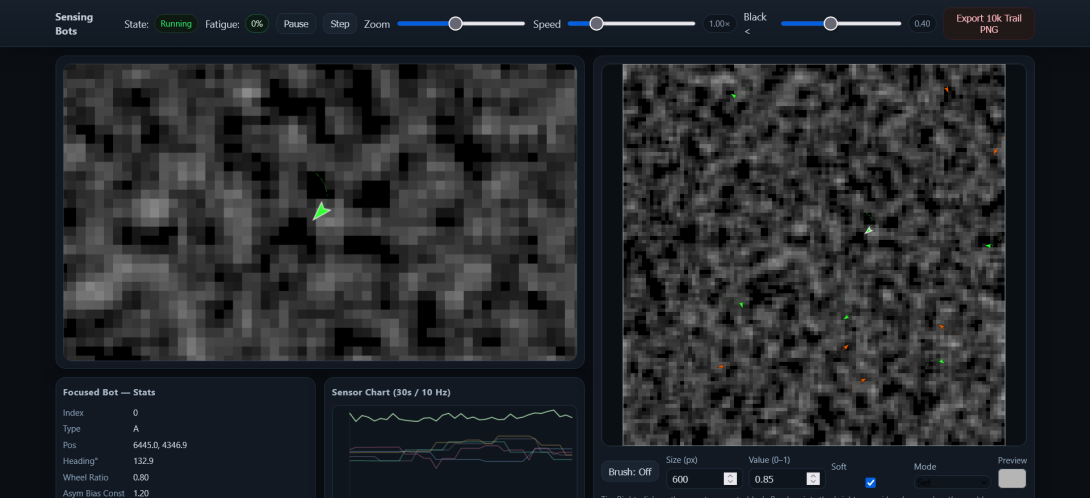
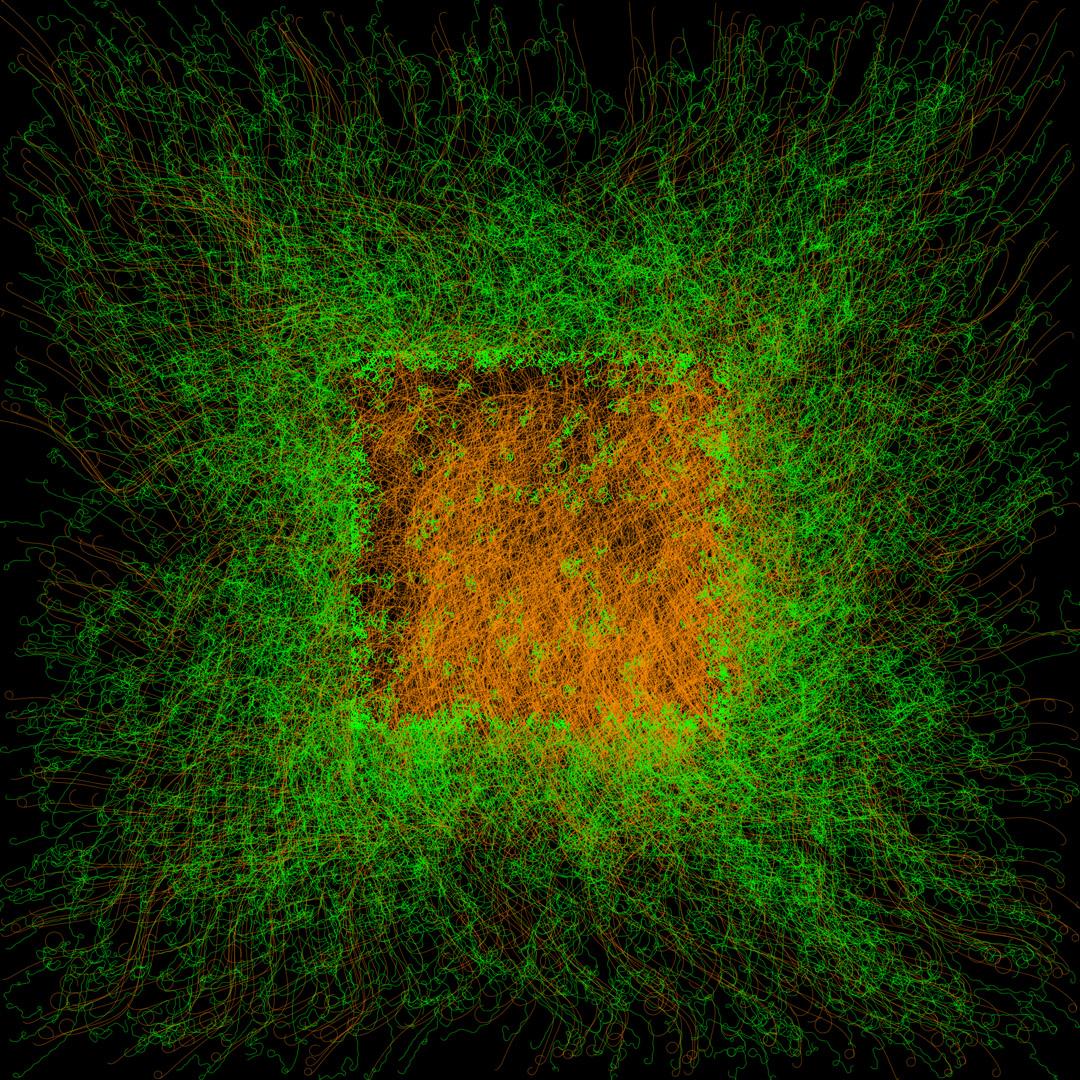
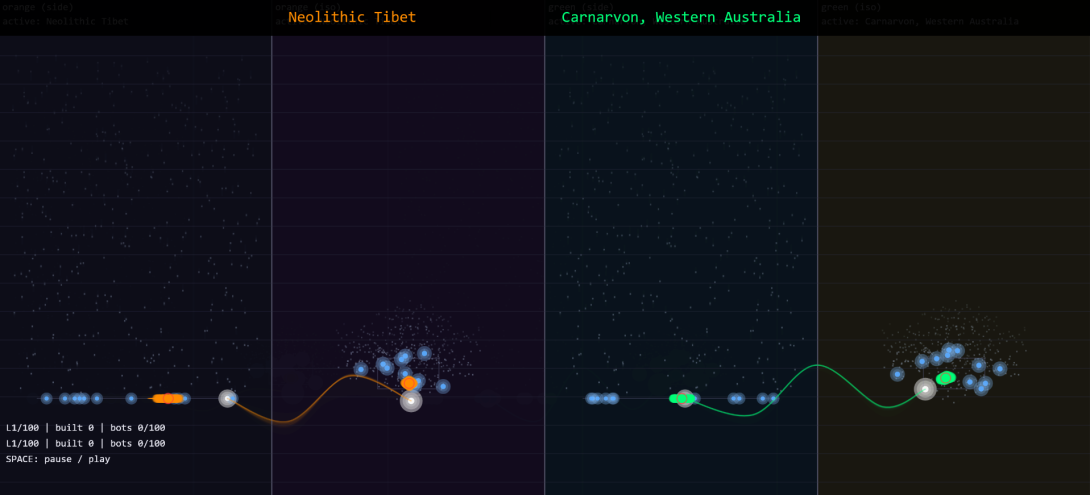
Simulation 2 (Sensing the World)
A population of orange and green bots, similar to the first simulation, moves through a shared, randomly generated environment. The perceptual capacities of the bots (i.e. their ability to sense their environment) are limited but equal, yet they differ significantly in their capacities for locomotion, fatigue, adaptation, and rest. The resulting behaviours are embodied rather than optimised, forming a rich micro-ecology of sensing and (divergent) response. Yet this is only one configuration or set of possibilities among many - a main difference with this simulation is that almost every aspect of the simulation can be reprogrammed by the user. As well as more superficial customisations, the orange-green difference, for instance, might be maximised or minimised, concealed or caricatured.
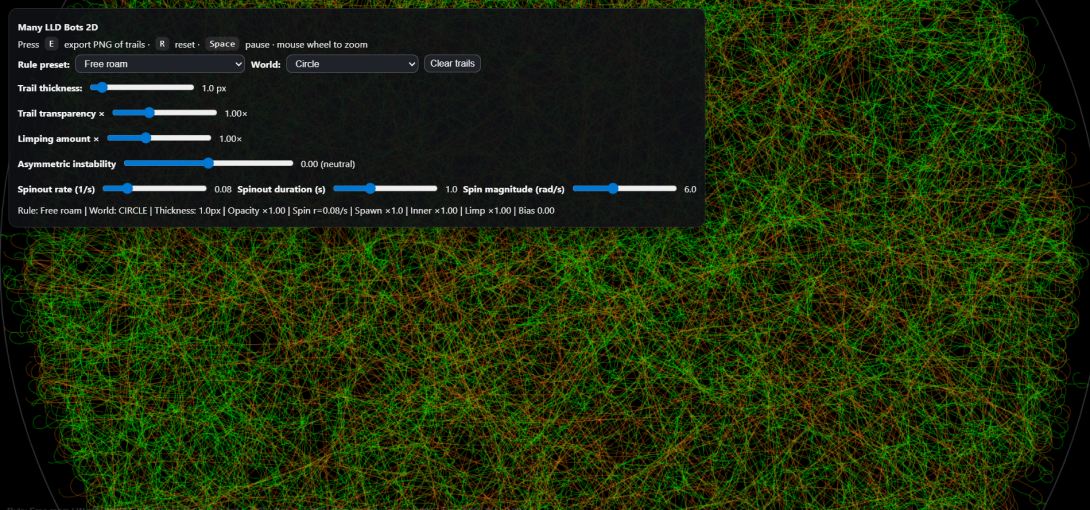
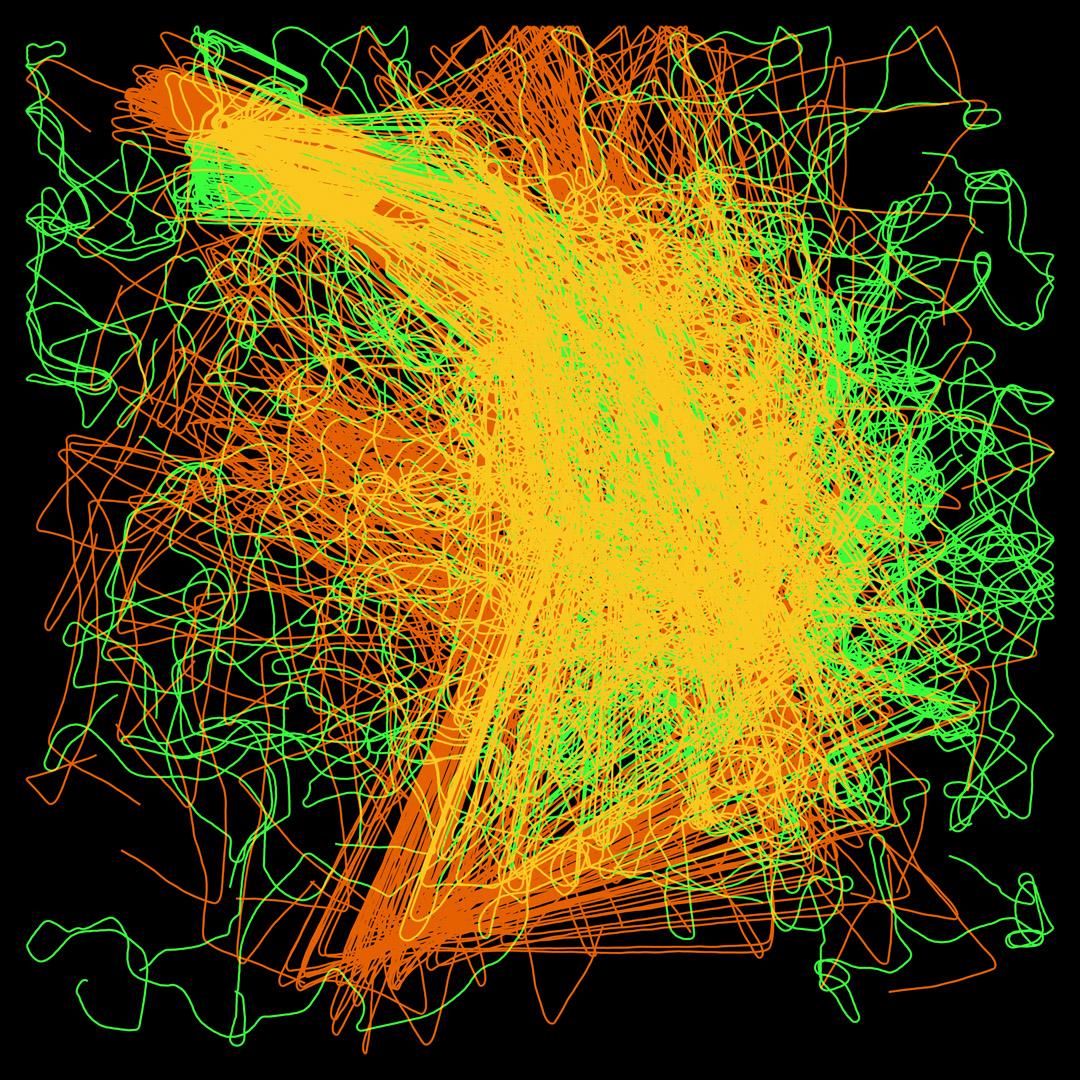
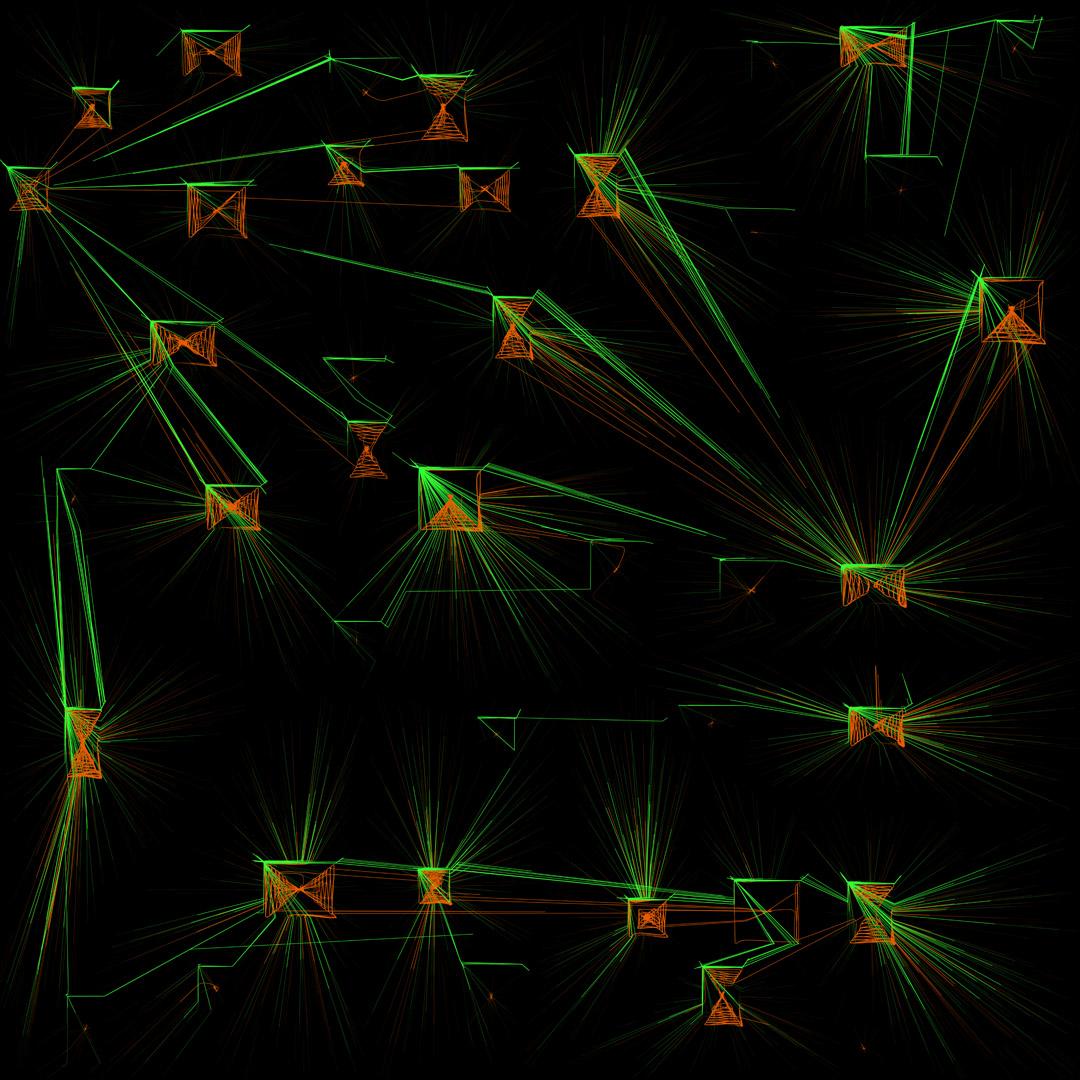
Simulation 3 (Scale)
Hundreds of orange and green semi-autonomous agents drift, navigate around, and adapt to a digital world mutable in shape and access. The simulation explores embodied, divergent motion at scale - how simple asymmetries impacting localised locomotion, fatigue, and instability can produce complex, emergent ecologies of large-scale spatial behaviour.
Simulation 4 (Multiple Perspectives)
Hundreds of orange and green semi-autonomous agents drift, navigate around, and adapt to a digital world mutable in shape and access. The simulation explores embodied, divergent motion at scale - how simple asymmetries impacting localised locomotion, fatigue, and instability can produce complex, emergent ecologies of large-scale spatial behaviour.
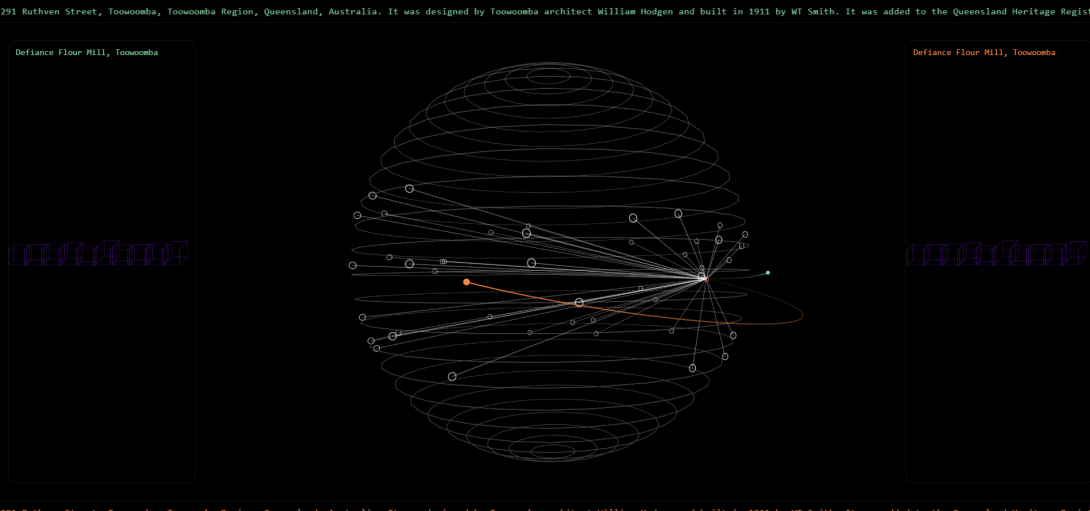
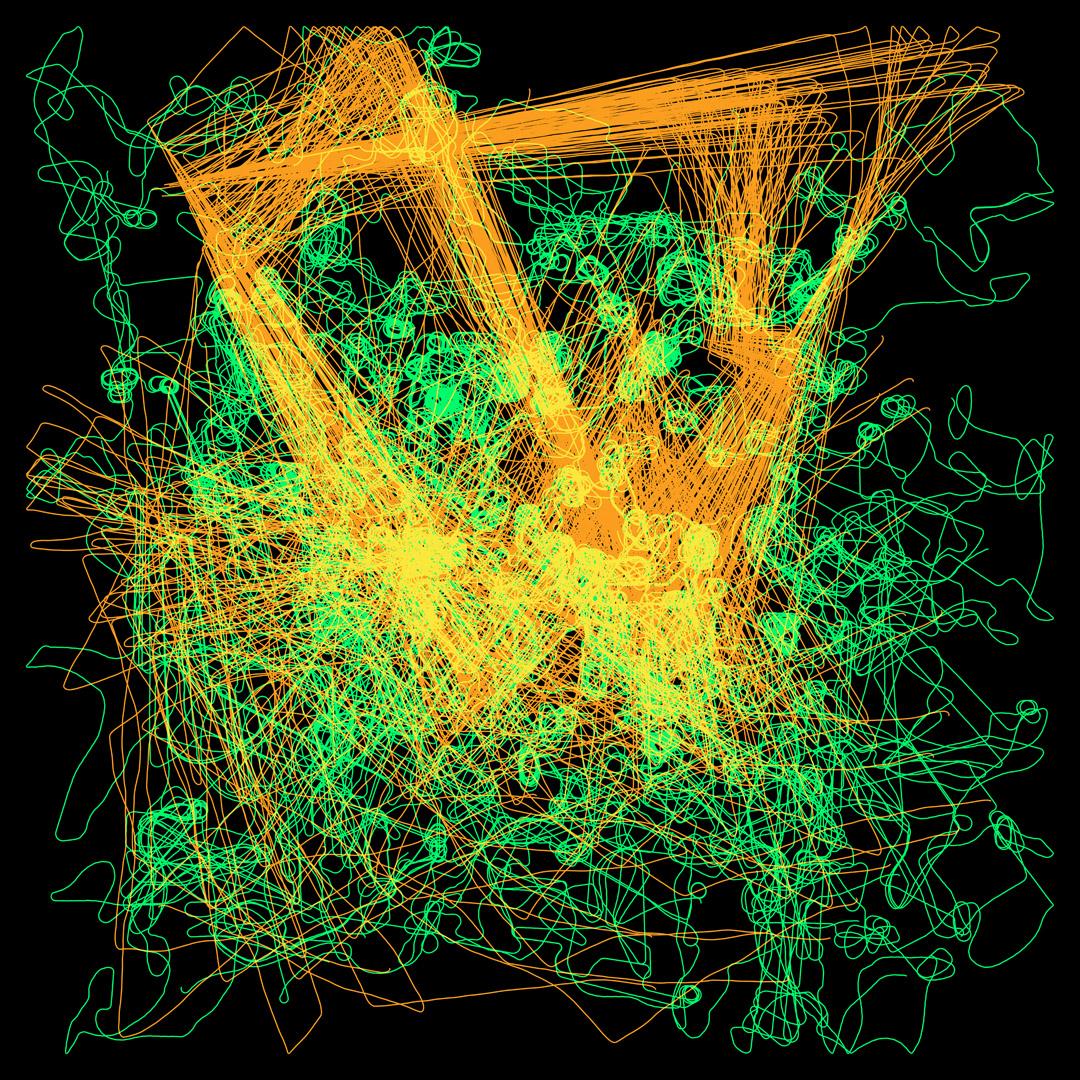
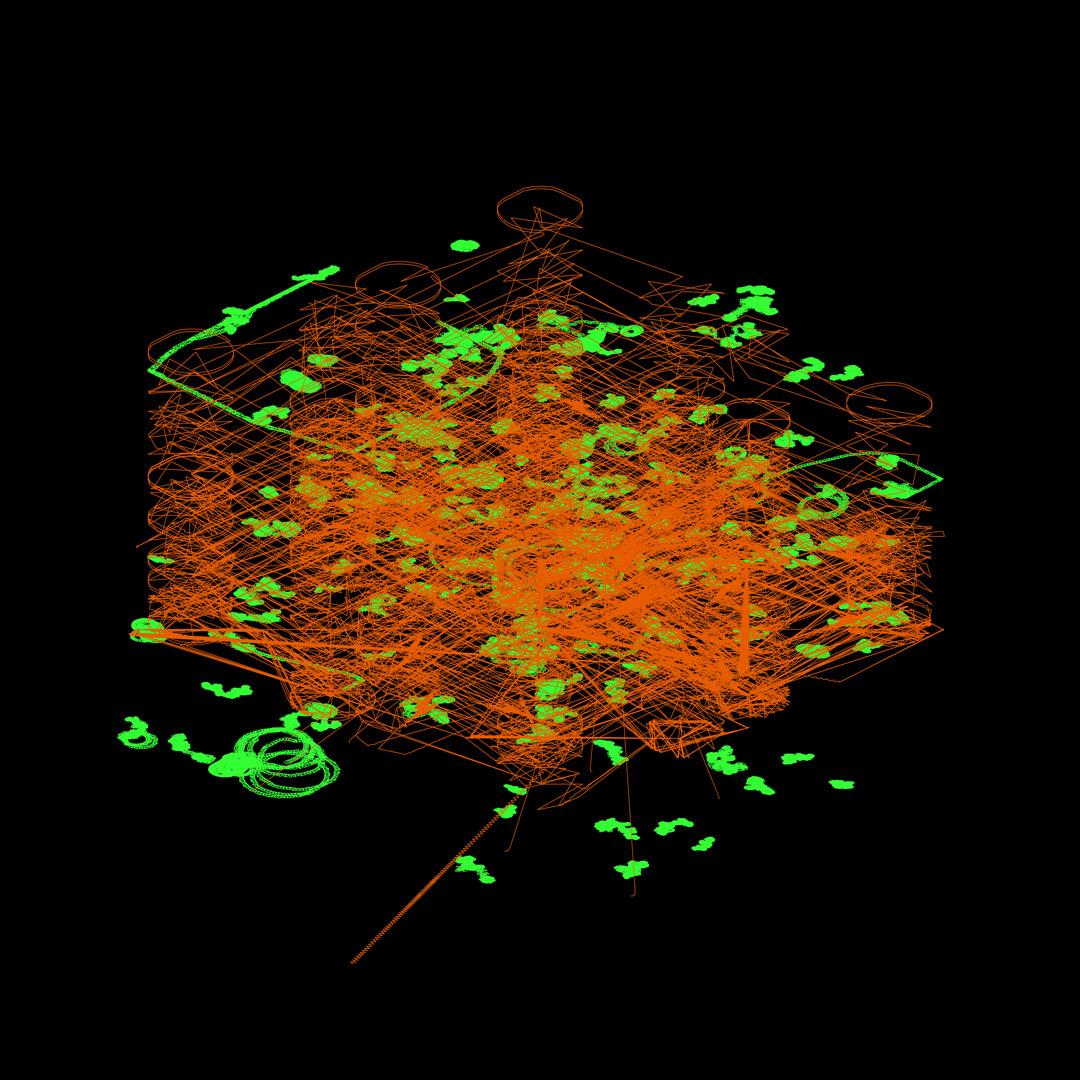
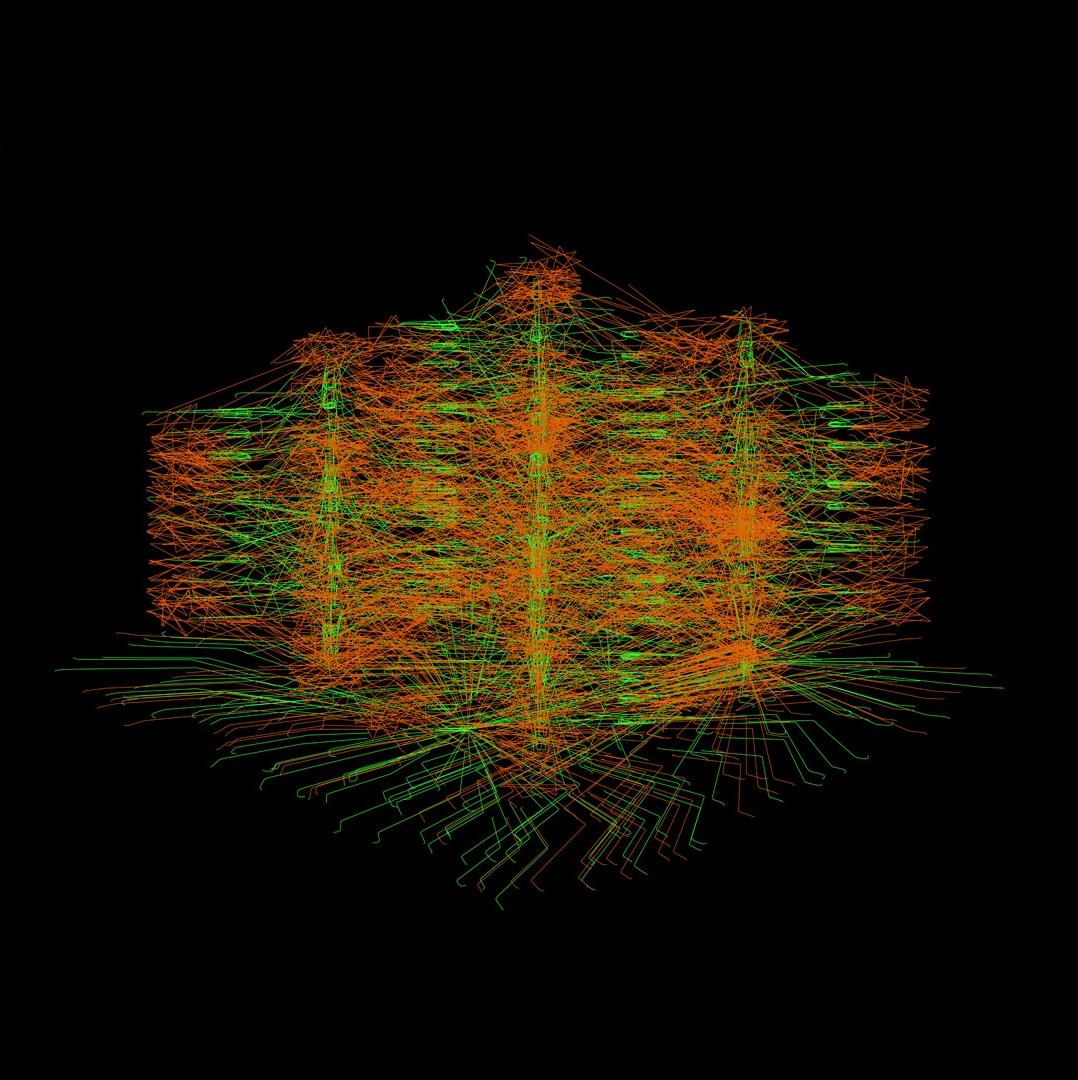
Simulation 5 (Knowledge)
The green bot moves slowly, unevenly. Its asymmetric body consumes more energy; its motion drifts and wavers. As it traverses a boundless archive, difference in movement becomes difference in knowledge, and that knowledge, in turn, materialises as difference in structure. Its architectures are not errors but translations of experience - physical records of how imperfection, detour, and persistence create new ways of knowing. In this endless, Babel-like library, where every possibility exists, the green bot finds meaning not through speed or order, but through encounter.
Simulation 6
The bots move through knowledge-containing structures unevenly, each different cache of knowing actively sculpting the architectures that rise from them, less built than manifested, each a trace of the particular way the respective bots understand their world.